

Подібно давній сімейній парі, які можуть передбачати кожен рух один одного, робот Columbia Engineering навчився передбачати майбутні дії та мету свого партнера-робота на основі всього декількох початкових відеокадрів.
Коли двоє людей, чи навіть приматів довгий час знаходяться разом, вони швидко навчаються розуміти один одного і передбачати вчинки або бажання. Наша здатність передбачати дії інших допомагає нам успішно жити й працювати разом. І навпаки, навіть найрозумніші та найсучасніші роботи залишаються свідомо нездатними до такого виду соціального спілкування. Але це незабаром може змінитися.
Дослідження, проведені в лабораторії Creative Machines Lab компанії Columbia Engineering є частиною значних зусиль щодо наділення роботів здатністю розуміти та передбачати цілі інших роботів, виключно на основі візуальних спостережень.
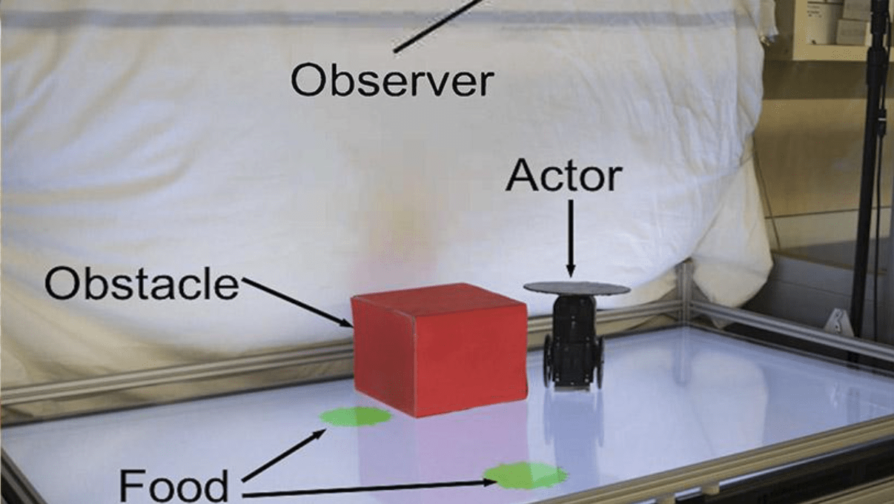
Спочатку дослідники побудували робота і помістили його в манеж розміром приблизно 3×2 фути. Вони запрограмували робота шукати й рухатися до будь-якого зеленого круга, якого він міг бачити. Але була одна особливість: іноді робот міг бачити зелений кружок у своєму полі та рухатися прямо до нього. А в інших випадках зелений круг був закритий високою червоною картонною коробкою, і в цьому випадку робот або рухався до іншого зеленого кола або не рушав взагалі.
Спостерігаючи за своїм партнером протягом двох годин, робот спостерігач почав передбачати мету і шлях свого партнера. Робот в кінцевому підсумку зміг передбачити траєкторію руху партнера в 98% разів у різних ситуаціях – не вказуючи при цьому на порушення видимості партнера.
«Наші перші результати дуже вражають», – каже Боюан Чен, провідний автор дослідження, яке було проведено у співпраці з Карлом Вондріком, доцентом кафедри інформатики, і опубліковано сьогодні журналом Nature Scientific Reports. “Результати починають демонструвати, як роботи можуть бачити світ з точки зору іншого робота. Здатність спостерігача поставити себе на місце свого партнера, так би мовити, і зрозуміти, без його відома, чи міг партнер бачити, чи не міг бачити зелене коло з його вихідної позиції. Можливо, це і є примітивною формою співчуття “.
При розробці експерименту дослідники очікували, що робот-спостерігач навчиться робити прогнози про найближчі дії робота-суб’єкта. Однак дослідники не очікували, наскільки точно робот-спостерігач зможе передбачити майбутні «рухи» свого колеги, спираючись лише на кілька секунд відео.
Дослідники визнають, що поведінка, продемонстрована роботом в цьому дослідженні, набагато простіша, ніж поведінка людей. Однак вони вважають, що це може бути початком наділення роботів тим, що вчені-когнітивісти називають «теорією розуму» (ToM).
Прогнози від машини-спостерігача: спостерігач бачить відео зліва і передбачає поведінку робота-актора, показаного справа. Маючи більше інформації, спостерігач може скорегувати свої прогнози щодо остаточної поведінки актора.
Дослідники змусили спостерігаючого робота робити свої прогнози в формі зображень, а не слів, щоб не заплутатися в складних проблемах людської мови. Проте, професор Ліпсон вважає, що здатність робота передбачати майбутні дії візуально не унікальна: «Ми, люди, також іноді думаємо візуально. Ми часто уявляємо майбутнє уявними картинами, а не словами ».
Ліпсон визнає, що існує безліч етичних питань. Технологія зробить роботів більш стійкими й корисними, але коли роботи зможуть передбачати, як думають люди, то вони також зможуть навчитися управляти цими думками.
«Ми розуміємо, що роботи не збираються надовго залишатися пасивними машинами, які виконують інструкції, як і інші ШІ», – каже Ліпсон. Ми сподіваємося, що політики зможуть допомогти тримати цей вид технологій під контролем, щоб ми всі могли отримати вигоду».